Ultima modifica: 26/08/2025
I dispositivi di interblocco vengono classificati in base a diversi criteri, per esempio la natura del collegamento fra riparo e sistema output o in base alla tecnologia del sistema di output (elettromeccanico, pneumatico, elettronico…).
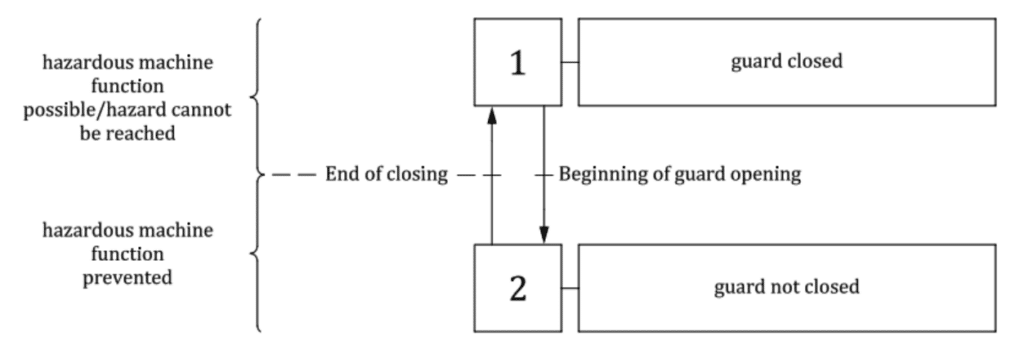
Sono dispositivi dotati di una funzione di controllo sulla posizione del riparo che rileva se questo sia chiuso o meno e in quest’ultimo caso invia un segnale di arresto delle operazioni pericolose. Gli interblocchi possono essere utilizzati per controllare altre funzioni destinate a fermare operazioni pericolose, come per esempio l’azionamento di un freno, per fermare la macchina in funzione, prima che ne sia possibile l’accesso; o, ancora, per bloccare i ripari mantenendo così la porta chiusa, fintanto che è in corso un’operazione pericolosa.
La Tabella 1 e gli schemi a fianco mostrano la classificazione degli interblocchi in base al principio attivatore e al tipo di attuatore presente.


5.2 Ripari interbloccati senza blocco del riparo
In assenza di un blocco del riparo, il riparo può essere aperto in qualsiasi momento. Ciò è possibile solo se il tempo necessario per entrare nell’area e avvicinarsi al pericolo risulta superiore al tempo necessario per eliminare il pericolo. Ad esempio, nel caso di un movimento pericoloso, l’area può essere protetta da un normale interblocco solo se il tempo per aprire il riparo e raggiungere il movimento pericoloso è maggiore del tempo necessario perché il movimento pericoloso si arresti (a partira dall’istante in cui il riparo è stato aperto).
5.3 Ripari interbloccati con blocco del riparo
Quando si utilizza l’interblocco con blocco del riparo, l’apertura del riparo è impedita da un dispositivo di blocco del riparo, a meno che tutte le funzioni pericolose della macchina associate a questo riparo non abbiano raggiunto lo stato di sicurezza. In questa configurazione, lo sblocco del riparo può avvenire:
- In qualsiasi momento da parte di un operatore, generando successivamente il comando di arresto. Il tempo di sblocco deve essere superiore al tempo di arresto delle funzioni pericolose (sblocco incondizionato);
- solo dopo l’arresto delle funzioni pericolose della macchina (sblocco condizionato).
Ci sono quattro possibili modi per bloccare una porta (interblocco con blocco del riparo):
- Chiusura a molla – apertura se energizzato. Si chiama anche “blocco meccanico del riparo”. Significa che il dispositivo di blocco del riparo viene spostato in posizione “bloccata” da una molla quando viene tolta l’alimentazione. Si tratta di un principio di corrente a circuito chiuso, in relazione alla funzione di blocco. Quando viene fornita l’alimentazione, il dispositivo viene sbloccato. In caso di black-out, la porta rimane bloccata.
- Chiusura se energizzato – apertura a molla. Funziona in modo opposto e si chiama “blocco del riparo elettrico”. Si tratta di un principio di corrente a circuito aperto. Per mantenere la porta bloccata, la corrente deve essere sempre presente. In caso di blackout, la molla viene rilasciata, la porta si sblocca e può essere aperta.
- Chiusura se energizzato – Apertura se energizzato. È un principio che non cambia posizione quando viene tolta l’alimentazione. È anche chiamato principio bistabile. Per passare all’altro stato è necessario applicare l’alimentazione. Poiché la rimozione dell’alimentazione non modifica la posizione del dispositivo di blocco del riparo, questo principio è considerato un principio a corrente chiusa. In caso di blackout, il blocco della porta rimane nella sua ultima posizione.
- Chiusura se energizzato – Apertura se de-energizzato. Corrisponde a un principio di corrente aperta, poiché il dispositivo di blocco della porta si apre quando viene tolta la corrente. Ha lo stesso comportamento del secondo caso, ma in questo non c’è la molla. La porta viene mantenuta chiusa grazie a un elettromagnete. In caso di blackout, il magnete viene diseccitato, la porta si sblocca e può essere aperta.
Ci sono due motivi per scegliere un interblocco con blocco del riparo:
- O per proteggere le persone. Ad esempio, all’interno di un’area protetta ci sono movimenti pericolosi che hanno un’inerzia. La porta viene sbloccata solo quando tutti i movimenti sono fermi.
- Oppure per motivi di produzione o di processo: non si vuole che il processo venga interrotto in momenti inadeguati.
Quale principio di blocco del riparo deve essere scelto?
Se il blocco del riparo è per motivi di produzione, tutti e quattro i metodi sono adatti: il secondo e il quarto sono probabilmente più “flessibili”. Per la protezione dei macchinari, l’ingegnere progettista è completamente libero di decidere quale tipo di chiusura del riparo scegliere, poiché non rappresenta una funzione di sicurezza.
Se il blocco del riparo serve a proteggere le persone, le soluzioni 1 e 3 sono quelle consigliate.
Quali sono i segnali di sicurezza in un dispositivo di interblocco con blocco del riparo?

Un interblocco ha diversi segnali di ingresso e di uscita. Nel disegno è mostrato lo schema del dispositivo di interblocco di Tipo 2 con blocco del riparo.
Il componente ha i seguenti ingressi ed uscite:
- Un segnale di ingresso: quello che blocca il dispositivo di interblocco agendo sul solenoide di blocco del riparo (numero 4 nella figura). Se il principio di blocco è scelto per la protezione delle persone, il segnale deve provenire da un sistema di sicurezza. In caso di ragioni di processo, può provenire da un sistema non di sicurezza.
- Due segnali di uscita: Contatti di monitoraggio dell’interblocco. Devono sempre essere indirizzati a un sistema di sicurezza (numero 6 nella figura).
- Uno o due segnali di uscita per il contatto di monitoraggio del blocco del riparo. Per ragioni di processo, lo stato può essere gestito da un PLC generico, altrimenti può essere gestito da un sistema di sicurezza (numero 6 nella figura).
Quali funzioni di sicurezza sono associate ad un interblocco?
L’interblocco con blocco del riparo può essere utilizzato su una porta che dà accesso a uno spazio protetto. Quando l’interblocco con blocco del riparo viene attivato, tutti i movimenti pericolosi all’interno dell’area devono essere fermati. Le funzioni di sicurezza da analizzare in una valutazione dei rischi sono in realtà due:
- La funzione di arresto legata alla sicurezza, quando la porta viene aperta.
- La prevenzione dell’avvio involontario mentre la porta rimane aperta.
Le due funzioni possono richiedere, in linea di principio, Performance Level o SIL diversi.
Tra i due rischi, l’ultimo è probabilmente il più importante: la prevenzione di un avvio inatteso.
Se all’interno dell’area c’è un movimento pericoloso, normalmente è visibile. Pertanto, se non viene fermato, quando la porta viene aperta, l’operatore ha buone possibilità di vederlo e di proteggersi.
Una situazione più pericolosa è quella in cui il movimento si arresta, l’operatore sta lavorando sulla parte pericolosa che improvvisamente riparte: in questo caso, la persona potrebbe non avere il tempo sufficiente per mettersi in posizione di sicurezza.
Inoltre, il blocco del riparo ha due funzioni di sicurezza che devono essere analizzate in termini di Performance Level o SIL richiesti:
- Il rilascio del blocco del riparo: in altri termini, quando la porta può essere sbloccata.
- La funzione di arresto legata alla sicurezza quando si rilascia il dispositivo di blocco del riparo: in altri termini, ciò che deve essere fermato all’interno dello spazio protetto, nel caso in cui la porta si sblocchi (ma rimanga comunque chiusa).
