Dernière modification: 17/05/2024
Introduction
Afin de faciliter la conception d’une SRP/CS et l’évaluation du PL atteint, la norme ISO 13849-1 utilise une méthodologie basée sur la répartition en catégories des architectures, avec des critères de conception spécifiques (MTTFD et DCavg) et un comportement spécifique dans des conditions de défaillance. Ces architectures se voient attribuer l’un des cinq niveaux appelés catégories B, 1, 2, 3 et 4.
La première édition de l’ISO 13849-1 était l’évolution de l’EN 954-1 et était toujours basée sur l’approche dite déterministe. Bien que l’approche de la théorie de la fiabilité ait été introduite dans l’ISO 13849-1 avec la deuxième édition, l’approche dite probabiliste, les 5 catégories définies par l’EN 954-1 ont été conservées en tant qu’éléments de base de la norme.
L’une des différences entre l’EN 954-1 et l’ISO 13849-1 est que, dans la première, les catégories ont été associées à l’ensemble de la SRP/CS, alors que dans la seconde, elles sont utilisées pour représenter des sous-systèmes. Cette association est clairement indiquée dans la nouvelle édition 2023. C’est pourquoi il n’est pas correct d’exiger qu’un système de sécurité, par exemple, soit de catégorie 3, puisqu’un système peut être conçu avec les sous-systèmes suivants :
– Le sous-système d’entrée est de Catégorie 3 : par exemple un dispositif de verrouillage avec 2 contacts libres de tension,
– La logique est un automate de sécurité PLC, généralement de Catégorie 4.
– La sortie est de Catégorie 1 : par exemple un contacteur simple.
Dans l’EN 954-1, la catégorie indiquait le niveau de fiabilité d’un SRP/CS. Les normes de type C exigeaient, par exemple, un SRP/CS de catégorie 3 ou de catégorie 1 : c’était le langage commun utilisé. Dans la nouvelle édition de la norme ISO 13849-1, le concept est clarifié : la Catégorie est un moyen d’atteindre le Niveau de Performance PL d’un sous-système. Il est donc inapproprié de décrire une SRP/CS en termes de catégorie : un système de sécurité a une PFH et un niveau de performance (ou un SIL, si la norme IEC 62061 est utilisée) mais, nécessairement, pas de catégorie (ni d’architecture).
La capacité des parties des systèmes de contrôle liées à la sécurité à exécuter les fonctions de sécurité dans des conditions prévisibles est indiquée par l’un des cinq niveaux appelés Performance Level ou PL . L’annexe A de la norme ISO 13849-1 contient une méthode qui peut être utilisée pour déterminer le PLr d’une fonction de sécurité exécutée par la SRP/CS. L’annexe A de l’IEC 62061 pourrait également être utilisée comme alternative.
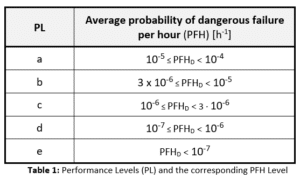
Le niveau de performance requis correspond à la réduction du risque que la fonction de sécurité doit fournir : plus la contribution requise à la réduction du risque est élevée, plus la performance de sécurité nécessaire est élevée. Les Performance Level des fonctions de sécurité sont définies en termes de probabilité moyenne de défaillance dangereuse par heure. Il existe cinq niveaux de performance, allant d’une faible contribution à la réduction des risques pour Pl a, à une contribution élevée à la réduction des risques pour PL e. Les fourchettes définies comme Probabilité de défaillance dangereuse par heure sont présentées dans le Tableau 1.
Afin de faciliter la conception d’une SRP/CS et l’évaluation du PL atteint, la norme ISO 13849-1 utilise une méthodologie basée sur la répartition en catégories des architectures, avec des critères de conception spécifiques (MTTFD et DCavg) et un comportement spécifique dans des conditions de défaillance. Ces architectures se voient attribuer l’un des cinq niveaux appelés catégories B, 1, 2, 3 et 4.
La première édition de l’ISO 13849-1 était l’évolution de l’EN 954-1 et était toujours basée sur l’approche dite déterministe. Bien que l’approche de la théorie de la fiabilité ait été introduite dans l’ISO 13849-1 avec la deuxième édition, l’approche dite probabiliste, les 5 catégories définies par l’EN 954-1 ont été conservées en tant qu’éléments de base de la norme.
L’une des différences entre l’EN 954-1 et l’ISO 13849-1 est que, dans la première, les catégories ont été associées à l’ensemble de la SRP/CS, alors que dans la seconde, elles sont utilisées pour représenter des sous-systèmes. Cette association est clairement indiquée dans la nouvelle édition 2023. C’est pourquoi il n’est pas correct d’exiger qu’un système de sécurité, par exemple, soit de catégorie 3, puisqu’un système peut être conçu avec les sous-systèmes suivants :
- Le sous-système d’entrée est de Catégorie 3 : par exemple un dispositif de verrouillage avec 2 contacts libres de tension,
- La logique est un automate de sécurité PLC, généralement de Catégorie 4.
- La sortie est de Catégorie 1 : par exemple un contacteur simple.
Dans l’EN 954-1, la catégorie indiquait le niveau de fiabilité d’un SRP/CS. Les normes de type C exigeaient, par exemple, un SRP/CS de catégorie 3 ou de catégorie 1 : c’était le langage commun utilisé. Dans la nouvelle édition de la norme ISO 13849-1, le concept est clarifié : la Catégorie est un moyen d’atteindre le Niveau de Performance PL d’un sous-système. Il est donc inapproprié de décrire une SRP/CS en termes de catégorie : un système de sécurité a une PFH et un niveau de performance (ou un SIL, si la norme IEC 62061 est utilisée) mais, nécessairement, pas de catégorie (ni d’architecture).